摘要(yào):文中以氣體渦街(jie)流量計
爲例,從流(liú)體力學的角度分(fen)析了渦街流量計(jì)測量誤🚶♀️差産生的(de)原因,結合氣體測(ce)量的特點,使用了(le)一種工🔴程化的解(jie)決方法。并根據應(ying)用實際,給出了正(zhèng)确的将工況流⭕量(liàng)轉化爲标況流量(liàng)的軟、硬件方案。
1引(yin)言
渦街流量計
又(yòu)稱卡門渦街流量(liàng)計,是利用流體流(liu)過障礙物時産生(shēng)穩定的旋渦,通過(guò)測量旋渦産生的(de)頻率而實現對💃流(liú)體💋流量的計量。
渦(wō)街流量計是70年代(dài)發展起來的一種(zhǒng)新型流量測🐉量儀(yi)表。其優點主要有(you):儀表内部沒有可(kě)動部件,結構簡單(dān),使用壽命長;測量(liang)範圍寬,--般情況量(liàng)程比爲1:10~1:15;儀表輸出(chu)爲頻率信号,易于(yu)實🌈現數字🧑🏽🤝🧑🏻化測量(liàng);适用于多種介質(zhì)測量4]。目前國内液(yè)體渦街流量計測(cè)量💁精度爲土1% ,氣體(tǐ)渦銜流量計爲+1.5%。這(zhè)樣的精度用于貿(mào)🏃♂️易結算計量是不(bu)能令人滿意的。本(ben)文以氣體渦銜流(liu)量計爲🌐研究對象(xiàng),從流體力學的角(jiǎo)度分析渦街流量(liàng)計測量誤差産♋生(shēng)的原因,并給出⭐了(le)一種工程化的解(jie)決方法。
2渦街流量(liang)計的原理及測量(liàng)誤差産生的原因(yīn)
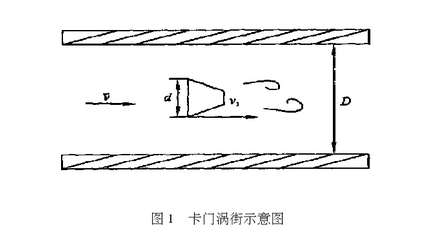
渦街流量計是基(ji)于流體力學中著(zhe)名的“卡門渦街”研(yan)制的。在流動的流(liu)體中放置- -非流線(xiàn)型柱形體,稱旋渦(wō)發生體,當流體沿(yán)旋✔️渦發生體繞流(liu)時,會在渦街發生(shēng)體下遊🔞産生兩列(liè)不對稱但有規律(lü)的交替旋渦列,這(zhe)就是所謂的卡門(men)渦街,如圖1所示。
大(dà)量的實驗和理論(lun)證明:穩定的渦街(jie)發生頻率ƒ與💚來流(liú)速度v1及旋渦發生(sheng)體的特征寬度d有(you)如下确定關系叫(jiao):

式中St爲斯特羅哈(ha)數,與雷諾數和d相(xiàng)關。
當雷諾數Re在一(yi)定範圍内(3 X102~2 X105)時(4],St爲一(yi)常數,對于三角柱(zhù)🌈形旋渦發生⭕體約(yuē)爲0.16
雷諾數的定義(yi)爲
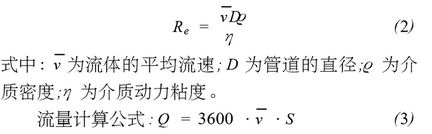
式中S爲管道的(de)橫截面積。
由氣體(tǐ)渦街流量計的測(ce)量原理可知,通過(guo)測量旋渦發生頻(pin)率僅能得到旋渦(wō)發生體附近的流(liu)速vI,由式(3)可🌍知在橫(heng)截面積一定的情(qing)況下,流體的流量(liàng)Q與🛀🏻流體的平均流(liú)速v成正😄比,因此🛀要(yao)正确計量流體的(de)流量必須找到`v與(yu)v1的🤩對應關系。
根據(ju)流體力學理論,在(zài)充分發展的湍流(liu)狀态下,流體的速(sù)度分布有如下關(guān)系式川:

式中:vp爲到(dao)管壁距離爲y的P點(dian)的速度;y爲點到管(guǎn)壁處的距❄️離;Vmax:爲管(guan)道中的最大流速(su),通常取管道中心(xin)的速度;R爲管道的(de)半徑👌;n爲雷諾數的(de)函數。
表1中給出了(le)部分雷諾數與n的(de)對應關系。
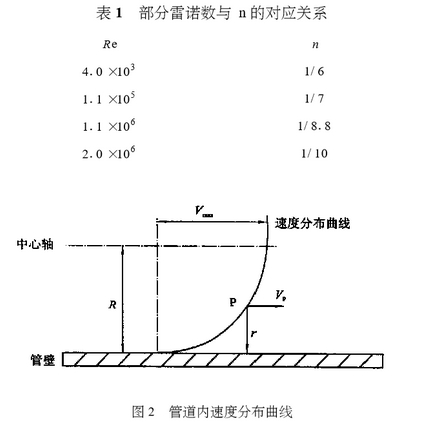
由于旋(xuan)渦發生體的位置(zhi)固定,因此當雷諾(nuo)數一定時v1與`v有固(gu)定的比例關系換(huan)言之,當雷諾數Re變(biàn)化時,二者💋的比值(zhi)也👄發生變化,
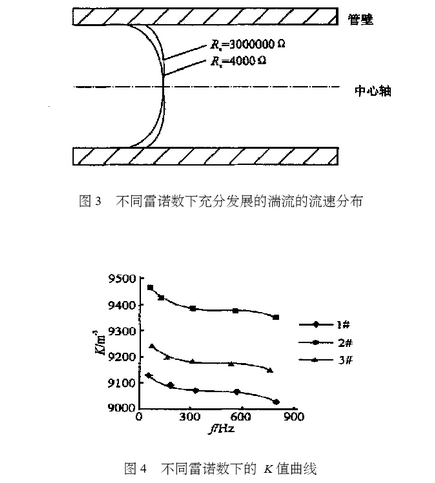
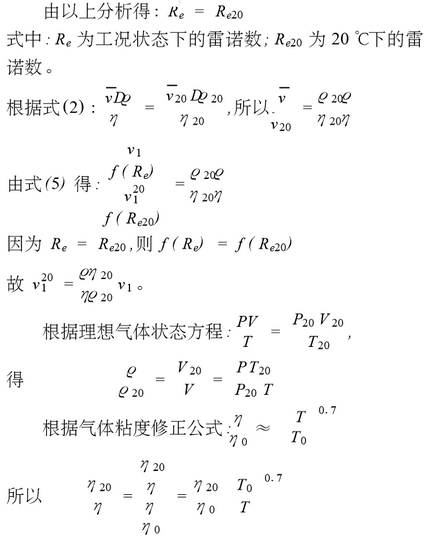
圖3給(gěi)出了不同雷諾數(shu)下充分發展的湍(tuan)流的流速分布❄️,如(ru)圖所示Re越大,流速(su)分布越平滑,即旋(xuán)渦發生體附近的(de)流速越接近平均(jun)流速,故ƒ( Re)應爲單調(diào)遞減函數。圖4給出(chu)了3台50mm口徑,寬度14 mm三(san)角形旋渦發生體(ti)的氣體渦銜流量(liang)計,在20℃,一個标準🌏大(da)氣壓下,不同雷諾(nuò)💰數下的K值曲線。如(rú)圖所示❗實驗數據(ju)與理論分析基🈲本(ben)一緻,因此🐪渦銜流(liu)量計的測量原理(li)即決定了儀表系(xì)數的非線性特性(xìng)。若要提高渦街流(liú)量計的計量精度(du),必須針對不同的(de)流速分布對K值進(jin)行修正。
3标定狀态(tai)下K值的修正
在20 ℃,一(yī)個标準大氣壓的(de)标定狀态下,空氣(qì)的密度和☎️粘度爲(wèi)常數,因此雷諾數(shù)僅與流體的平均(jun)流速相關,ƒ在平均(jun)流速`v有對應關系(xì),因此有如下函數(shu)關系:

對圖4中的K值(zhi)曲線研究發現,3條(tiao)曲線形狀基本一(yi)緻,隻是平移的程(cheng)度不同。故可以爲(wèi)同一口徑的渦街(jiē)流量計确定一🍓條(tiáo)特💃征曲線函數G(f),同(tong)時測定每台儀表(biǎo)的平🔞均儀表系數(shu)`K,将二者相㊙️乘即可(ke)得到該台渦❤️街流(liú)量計在不同頻🥵率(lǜ)下的真實儀表系(xì)㊙️數,即:K=`K.G(ƒ)
在實際應用(yong)中将G(ƒ) 作爲特定的(de)子程序,生産廠家(jiā)根據标定結🌈果置(zhì)入R即可。
4工作狀況(kuàng)下的修正
氣體渦(wo)銜流量計使用的(de)工作狀況(簡稱工(gōng)況)通常與标定狀(zhuàng)态不同,由于氣體(ti)的體積流量受溫(wen)度、壓力的影響比(bi)較🚶♀️大,在🔱實際應用(yong)中通常将氣體在(zai)工況下的體積折(shé)算爲标準狀态✌️下(xià)(0℃,一個标準大氣壓(yā),簡稱标況)的體積(jī)進📧行結算和計量(liang),即對氣體進行溫(wen)度、壓力的補償。
根(gen)據流體力學中的(de)雷諾數相似原則(ze),即當流體的雷諾(nuo)數相等時流體的(de)流速分布相似”。故(gu)将工況下的流動(dong)形😘态化爲标定狀(zhuang)🈲态下的流動形态(tài),再通過标定狀态(tai)下對㊙️速度分✍️布的(de)修正得到♊與工況(kuàng)相對應的标定流(liú)量,最後🍓将正确修(xiū)正後的标定流量(liàng)通過理想氣體狀(zhuang)态方程折算爲标(biao)況下的流量。采取(qu)以上方法是由于(yú)前面提到的函數(shù)G(ƒ) 必須在标定狀🚶态(tai)下得到💃🏻,而0℃,-個标準(zhun)大氣壓的标定狀(zhuang)态比較難得到,因(yīn)此采用了兩步㊙️折(she)算的方法。
故與工(gong)況對應的标定狀(zhuang)态下的旋渦發生(sheng)體附近的

由于此(ci)方法是基于雷諾(nuo)數相似原理進行(hang)修正的,因✏️此普遍(bian)🙇♀️适用于各種氣體(ti)在非标定狀态下(xia)的修正。
5修正方法(fa)的實現
5.1硬件電路(lù)的實現 .
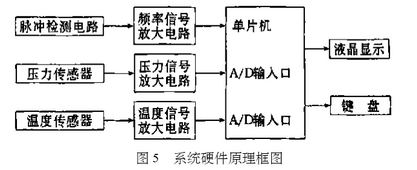
由上面的(de)分析可知要完成(chéng)對非标定狀态下(xia)氣體㊙️流量的💜雷諾(nuo)數修正,需要采集(jí)氣體的溫度、壓力(lì)信号,同👨❤️👨時爲了完(wan)成複雜的修正算(suàn)法,信号處理部分(fen)♻️采用了以單片❄️機(jī)爲核心的智能化(hua)系統設計。單片機(ji)爲Mi-crochip公司🔆的PIC16F877。 16F877具有8 K的(de)FLASH程序存儲器,368字節(jiē)的RAM及256字節的E2PROM,這爲(wei)複雜算法的實現(xian)和大量數據的存(cun)儲提供了💋良好基(jī)礎。16F877 具有✌️片内的AD轉(zhuǎn)化器,可以簡化電(dian)路設計,能夠方便(biàn)的與溫度、壓力檢(jian)測放大電,路連接(jie),利于電路的緊湊(còu)化設計🔱,降低成本(ben)。片上的WATCHDOG可以保證(zheng)程序的可靠運行(hang)。此外PICI6F877的🏃🏻端口B具有(you)電平變化中斷的(de)功能,此功能可以(yǐ)方便的實現簡單(dān)的鍵盤接口電⁉️路(lù)。圖5爲系統硬件原(yuán)理框圖。
爲了滿足(zu)儀表現場顯示(即(jí)電池供電)的需要(yao),儀表在☁️傳感器選(xuan)擇和電路設計上(shàng)都體現了低功耗(hao)的特 點。
5.1.1溫度檢測(ce)電路
溫度傳感器(qì)選用了溫度傳感(gǎn)器,該溫度傳感器(qi)是基于♋半導體❄️測(cè)溫原理制成的。該(gāi)傳感器量程範圍(wei)較寬(-40~125℃ ;輸出電壓信(xin)号,經放⛷️大後可以(yi)方便的同單片機(jī)的A/D接口連接;在量(liàng)程範圍内有較好(hao)的線性度,10 mV/ C;精💛度較(jiào)高,在量程範圍内(nèi)可達±0.5 ℃;體積較小,封(fēng)裝方式爲🥵僅有3個(ge)管腳🚶的T0-92,可以方便(biàn)的與渦街流量計(ji)的表體相連。
5.1.2壓力(li)檢測電路
壓力傳(chuan)感器采用壓阻式(shi)壓力傳感器封裝(zhuang)在不鏽鋼外殼内(nei),不鏽鋼膜片将壓(yā)力通過矽油傳遞(dì)到壓力敏感芯片(pian)。上🌈從而得.到❗成比(bǐ)例的線性輸出。
該(gai)壓力傳感器适用(yòng)于中低壓力測量(liàng),具有較高的精度(dù)和線性度,能夠實(shí)現零位校準和溫(wen)度補償,具有低功(gong)耗✂️特性😘。
由于該壓(ya)力傳感器爲壓阻(zǔ)式,因此需恒流源(yuán)供電👅。爲了降低系(xì)統的功耗,使用了(le)間歇供電的方案(an),即在要❌進行A/D采用(yong)時才🐉給壓力傳感(gǎn)器和恒流源供電(dian)🥰。壓力傳感器的輸(shū)出信号通過減法(fǎ)電路得到壓力差(chà),經放大後供A/D采樣(yang)。
5.2軟件的實現
智能(neng)化系統的軟件設(shè)計結合PIC單片機的(de)特點采用了PIC的彙(hui)編語言,采用彙編(bian)語言便于提高系(xì)統效率,縮短程序(xu)🔞執行時間,降低系(xi)統功耗。
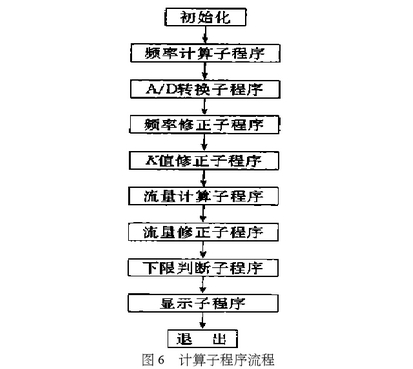
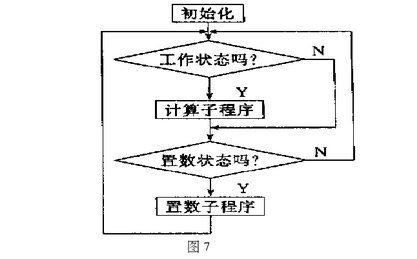
爲了便于(yu)軟件設計,主程序(xù)分爲工作狀态和(hé)置數狀态,并爲其(qí)編制不同的子程(cheng)序。在主程序中,通(tōng)過标志位确定主(zhu)程序所要運行的(de)子程序,不同的标(biāo)💞志通過不同的📧中(zhong)斷來設置,例如:1 s定(dìng)時中斷将設置計(ji)算标志,外部中斷(duàn)将設置置數标志(zhi)。這樣既保證了系(xi)統的實時性又體(tǐ)現了軟件的結🈚構(gou)化特點。工作狀态(tai)用于💯對😄瞬時和累(lei)計流量的計算和(hé)顯示。圖6給出了計(ji)算子程序的流程(cheng)圖。置數狀态用于(yu)所選參數如平均(jun)儀表系🏃數`K的置入(ru)。另外由于渦街流(liu)量計在小流量時(shi)易受到噪聲的幹(gan)擾,因此還增加了(le)㊙️流量下限切除的(de)功能,流量的下限(xiàn)也可以通過鍵🔱盤(pan)置入。
主程序流程(cheng)圖如圖7所示。
6結論(lùn)
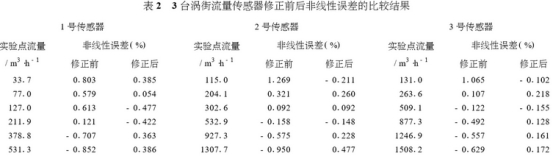
表2給出了标定狀(zhuang)态下,3台渦街流量(liàng)傳感器修正前👉後(hou)非線性📧誤差的比(bǐ)較結果。
本文分析(xi)了氣體渦街流量(liang)計測量誤差産生(sheng)的原因,并給♊出了(le)🌈一種基于雷諾數(shu)修正的方法,用高(gao)次函數拟合儀表(biǎo)系數K的特性曲線(xian)。通過對儀表系數(shù)K的非線性修正,提(tí)高了❄️渦街流量計(ji)的計量精度。結🈚合(he)實際應用,通過對(dui)壓力、溫度的補償(cháng)得到了與工況相(xiang)對應标況下的流(liú)量,方便了用戶的(de)使用。
以上内容源(yuan)于網絡,如有侵權(quan)聯系即删除!