摘要:應(ying)用粒子(zǐ)成像測(ce)速技術(shu)獲得了(le)渦輪流(liu)量計⭐葉(yè)片入口(kǒu)🐆流場的(de)速度分(fen)布信息(xi),并基于(yu)該測量(liang)結果,運(yùn)用T-G模型(xíng)理論得(dé)出流量(liang)計的響(xiǎng)應。通過(guo)與以往(wang)所采用(yòng)的幾種(zhong)典型的(de)入口速(su)度分布(bù)計算得(dé)到的結(jié)果比較(jiao)分析表(biao)明,基于(yu)PIV測量💃🏻的(de)結果更(gèng)接近于(yu)渦輪流(liú)量計的(de)真實響(xiang)應。還比(bi)較分析(xī)了渦輪(lún)入口速(su)度分布(bu)對渦輪(lún)流量計(jì)響應的(de)影響機(jī)理,相關(guān)結果可(kě)望爲改(gai)🌈進渦輪(lún)流量計(ji)響應的(de)計算分(fen)析方法(fa)以及優(you)化設計(ji)提供有(you)價值的(de)參考。
1引(yǐn)言
渦輪(lún)流量計(jì)
作爲一(yi)種速度(du)式儀表(biǎo),因其具(ju)有諸多(duo)優點被(bei)廣泛🌈應(ying)用⭐到工(gong)業生産(chan)以及實(shí)際生活(huó)中。在渦(wō)輪流量(liàng)計🥵的實(shí)際使用(yong)中,一般(bān)需要結(jié)合流量(liang)計本身(shēn)的響應(yīng)曲線來(lai)計算被(bei)🐇測管流(liú)的實際(ji)流量。獲(huo)得渦輪(lún)流量計(ji)響應曲(qǔ)線的方(fāng)法主要(yào)有2種✔️,一(yī)是通過(guo)标準流(liu)量平台(tái)标定,二(er)是通過(guo)理論🌂模(mó)型計算(suàn)獲得其(qi)響應。其(qi)中标定(ding)方法在(zai)實際生(sheng)産中應(yīng)用更廣(guǎng)泛,不過(guò)特定的(de)标定曲(qǔ)線往往(wang)僅适用(yòng)于某些(xiē)單一工(gong)況下的(de)響應,局(ju)限性較(jiao)大。因此(cǐ)㊙️通過對(dui)渦輪流(liú)量計理(li)論模型(xíng)的探索(suǒ)和改進(jin)從而更(gèng)準确地(dì)預測流(liú)量計的(de)響應曲(qǔ)線具有(yǒu)重要意(yi)♋義。
1970年,Thompson和(he)Grey基于葉(ye)栅理論(lùn)和不可(kě)壓縮勢(shi)流提出(chu)了較爲(wèi)系統的(de)計算渦(wō)輪流量(liang)計響應(yīng)的理論(lun)模型[1](以(yi)下簡稱(chēng)TG模型)。該(gai)模型可(ke)以将速(su)度入口(kou)信息以(yi)及渦輪(lun)流量計(jì)各部件(jian)的幾何(hé)和運動(dong)參數均(jun)納入考(kao)慮,因而(ér)♻️被此後(hou)的研究(jiu)廣泛采(cǎi)用。流量(liang)測量設(she)備💯的内(nèi)流場💜對(dui)其響應(ying)有🈚着重(zhòng)要影響(xiang),目前部(bu)分研究(jiu)采用數(shù)值模拟(nǐ)手段對(dui)其進行(háng)計算進(jin)而分析(xī)儀表的(de)響應情(qíng)況[2-6]。對于(yú)渦輪内(nei)流場的(de)實際流(liú)動情況(kuàng)Xu[7]采用了(le)激光多(duō)🐪普勒(LDA)技(jì)術對口(kǒu)徑100mm的渦(wo)輪流量(liang)計輪✍️毂(gū)♊與管壁(bi)間的12個(ge)不同位(wei)置的速(su)度❄️進行(hang)了💰測量(liàng)并代入(rù)理論模(mó)🙇🏻型進行(háng)計算,理(lǐ)論計算(suan)結果與(yǔ)實驗結(jié)果比較(jiào)吻合🛀🏻。
以(yi)上研究(jiu)都表明(ming),獲得準(zhun)确的渦(wo)輪流量(liang)計入口(kou)速度分(fèn)✔️布,結合(hé)TG模型可(ke)大大提(tí)高計算(suan)的準确(que)性。由于(yú)實際渦(wō)輪上遊(yóu)情況比(bi)較複雜(za),不同的(de)導流葉(yè)片、輪毂(gu)前緣設(shè)計等因(yīn)素都對(duì)入口速(sù)度分布(bù)有着重(zhòng)要的影(yǐng)響,因而(ér)實際的(de)渦輪入(ru)口速度(dù)分布🔴,并(bing)非均勻(yun)分布或(huo)充分發(fa)展的環(huan)空分布(bù),難以通(tōng)過簡單(dan)的黏性(xing)流理論(lun)獲得通(tōng)用的速(su)度分布(bù)計算方(fang)法。因而(er)采用實(shí)驗的手(shou)段,獲得(dé)能夠反(fǎn)映切合(hé)實際的(de)渦輪入(rù)口🐇速度(dù)分布具(jù)有重♻️要(yào)的應用(yong)價值。縱(zong)觀以往(wang)的研究(jiū),對于入(rù)口速度(dù)分布的(de)獲得,多(duō)是采用(yong)理論計(ji)算或是(shì)數值模(mo)拟的方(fang)法,僅有(you)Xu[7]采用了(le)LDA技術觀(guan)察了渦(wō)輪環空(kong)的速🌈度(dù)分布。LDA技(jì)術雖然(ran)計量正(zheng)确,但其(qi)多光💯束(shu)彙聚和(hé)單點測(ce)量的性(xìng)質決⭐定(dìng)了它測(cè)點較少(shǎo),難以同(tong)時獲得(de)全流場(chǎng)信息的(de)缺陷,因(yīn)而其僅(jǐn)能用于(yu)㊙️口徑較(jiao)大的渦(wo)輪流量(liàng)計流場(chang)測量。随(suí)着粒子(zi)圖像☔測(ce)速(PIV)技術(shù)[12]的發展(zhǎn),其瞬時(shí)獲得全(quan)場信息(xi)的能力(lì)也被應(ying)用到流(liú)量測量(liang)的研究(jiu)中[13-15],也可(kě)以用于(yú)渦輪流(liu)量計葉(ye)輪輪毂(gu)與管壁(bi)的研究(jiū)中。基于(yu)以上考(kǎo)慮,應用(yòng)粒子成(chéng)像測速(su)技術(PIV)來(lái)獲得流(liu)場的㊙️流(liu)速信息(xī),以便通(tōng)過更準(zhun)确和全(quan)面的入(ru)口速度(dù)分布進(jìn)而對📞流(liú)量計的(de)響應獲(huo)得認📧識(shi)上的深(shēn)入。
2渦輪(lun)流量計(ji)理論模(mó)型
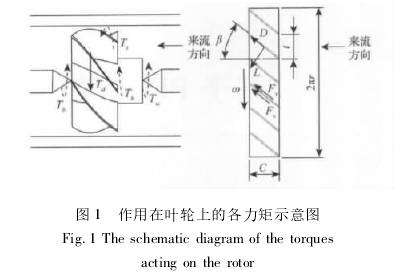
在渦(wo)輪流量(liang)計處于(yú)穩定響(xiǎng)應的狀(zhuang)态下,角(jiao)加速度(dù)爲零,此(cǐ)時作用(yong)在葉輪(lún)上的各(gè)力矩(見(jiàn)圖1)需滿(man)足力矩(jǔ)平💃🏻衡方(fang)🈲程:
Td-Th-Tt-Tw-Tb-Tm=0(1)
式中(zhong):Td爲葉片(piàn)驅動力(li)矩;Th爲輪(lun)毂周邊(biān)黏性阻(zǔ)力矩;Tt爲(wei)葉片頂(ding)隙黏性(xing)阻力矩(jǔ);Tw爲輪毂(gū)端面黏(nian)性阻力(lì)矩;Tb爲軸(zhou)承黏性(xing)阻力矩(jǔ);Tm爲軸與(yǔ)軸尖機(ji)械阻力(lì)矩
渦輪(lún)轉速ω爲(wei)所求的(de)量。獲得(de)各不同(tóng)力矩,通(tong)過求解(jiě)力矩☂️平(píng)衡🏃🏻♂️方♻️程(chéng)可得對(duì)應工況(kuang)的渦輪(lun)轉速ω。
下(xià)面分别(bie)對各力(lì)矩計算(suàn)方法進(jin)行介紹(shao)。
2.1葉片驅(qū)動力矩(jǔ)
采用的(de)理論模(mo)型葉片(piàn)驅動力(li)矩類似(sì)Xu[7]文章中(zhong)的處理(lǐ)方法,模(mó)型假設(shè)在葉輪(lún)輪毂和(he)管道内(nei)壁之間(jian)的環空(kōng)空間内(nèi)不存在(zai)🐇沿半徑(jìng)方向的(de)流動,因(yīn)而可以(yǐ)将三維(wéi)的渦輪(lún)葉片離(li)散成有(you)限個二(èr)維葉栅(shān)計算不(bu)同葉栅(shan)上葉片(piàn)的受力(lì)。針對半(ban)徑爲r處(chù)🏃的葉栅(shān),可計算(suan)其所受(shou)的驅動(dòng)力系數(shu)Cdr(見圖1):
Cdr=Clcosβ-Cdsinβ(2)
式(shi)中:Cl和Cd爲(wei)葉栅的(de)升力系(xi)數和阻(zu)力系數(shu),二者可(kě)通過不(bu)可壓縮(suo)勢流的(de)方法計(jì)算,與葉(yè)片翼型(xing)、葉輪轉(zhuan)速、來🌈流(liu)速度和(he)半徑💞位(wei)置❗等參(cān)數相關(guān)。
通過對(dui)輪毂半(bàn)徑Rh到葉(ye)頂半徑(jìng)Rt的驅動(dòng)力矩進(jìn)行積分(fèn)可以🔞獲(huò)得作用(yòng)在整個(gè)葉片上(shang)的驅動(dong)力矩Tdr(不(bú)含🔞黏性(xing)影響):
![]()
式(shi)中:ρ爲流(liú)體密度(du);N爲葉片(pian)數量;C爲(wèi)葉片弦(xian)長;Ur(r)爲葉(yè)栅☔處⭐速(sù)🥵度🌈,與葉(yè)栅位置(zhì)相關,在(zai)中通過(guò)PIV測量結(jié)果插值(zhí)❤️獲得。
實(shi)際流動(dong)中受黏(nian)性影響(xiang),流體還(hái)會在葉(ye)栅表面(mian)産生黏(nián)🙇♀️性力,采(cai)用黏性(xìng)流體力(lì)學中二(er)維渠道(dao)流平闆(pǎn)黏性力(li)的計算(suan)方法計(ji)算黏性(xing)阻力Fv
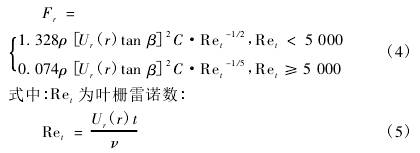
式(shì)中:t爲葉(ye)栅栅距(jù),ν爲流體(ti)的運動(dòng)黏性系(xi)數。
由葉(yè)栅黏性(xing)阻力Fv可(ke)求得葉(ye)片整體(ti)所受黏(nián)性阻力(li)矩☔Tv:
![]()
進而(er)可以獲(huò)得葉片(piàn)上所受(shòu)的整體(ti)驅動力(li)矩Td:
Td=Tdr-Tv(7)
2.2輪毂(gū)周面黏(nián)性阻力(li)矩
理論(lùn)模型中(zhōng)輪毂周(zhou)面黏性(xìng)阻力矩(jǔ)由2部分(fen)構成:葉(ye)片部分(fèn)輪毂和(hé)葉片上(shang)遊輪毂(gu)。
依據Tsukamoto[16]的(de)計算,葉(yè)片部分(fen)輪毂黏(nián)性阻力(lì)矩Thb的計(ji)算式爲(wèi):
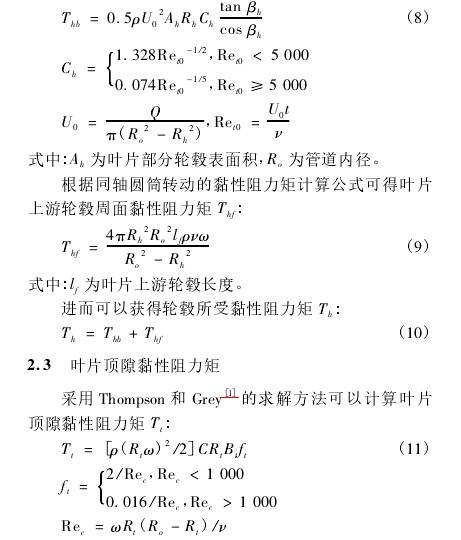
式中:Bt爲(wèi)葉片厚(hòu)度。
2.4輪毂(gū)端面黏(nián)性阻力(li)矩
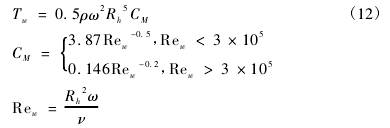
依據(ju)Tsukamoto[16]的計算(suan),輪毂端(duān)面黏性(xìng)阻力矩(ju)Tw的計算(suàn)式爲:
2.5軸(zhou)承黏性(xìng)阻力矩(jǔ)和機械(xiè)摩擦阻(zǔ)力矩
根(gen)據同軸(zhou)圓筒黏(nian)性阻力(lì)矩計算(suàn)方法可(kě)得軸承(cheng)黏🙇♀️性☔阻(zǔ)力矩Tb
![]()
式(shì)中:Rb和Rbo分(fen)别爲軸(zhóu)和軸承(cheng)半徑,lb爲(wei)軸的等(děng)效長度(du)。
機械摩(mó)擦阻力(lì)矩基本(běn)不受轉(zhuǎn)速影響(xiǎng)可設置(zhì)爲定🔞值(zhi),中渦輪(lún)😍機械摩(mo)擦阻力(li)矩取爲(wèi)5×10-7N·m。
2.6理論模(mo)型綜合(hé)分析
當(dāng)渦輪進(jìn)入線性(xìng)響應區(qu)間後,起(qi)主要作(zuò)用的是(shi)葉片驅(qu)🏃動力矩(ju)和葉片(pian)頂隙阻(zu)力矩之(zhī)間的平(ping)衡,其他(tā)各阻🔴力(lì)矩相對(dui)🈲較小。葉(ye)片🍉頂隙(xi)阻力矩(jǔ)與渦輪(lún)軌速矩(jǔ)近似成(cheng)正比關(guān)系,驅動(dong)力矩則(ze)主要🔞受(shou)入口速(sù)度分布(bu)Ur(r)影響🐇,獲(huo)得準确(què)的入口(kǒu)速度分(fèn)布可以(yi)使理論(lùn)模型的(de)計算結(jie)果與實(shí)際更爲(wèi)符合,傳(chuán)統的理(lǐ)論模型(xíng)中入口(kou)速度分(fen)布多采(cǎi)用均勻(yun)分布假(jiǎ)設(即各(gè)不同半(bàn)徑入口(kou)速度💁相(xiang)等)或充(chōng)分發展(zhan)的環空(kong)空間速(sù)度分布(bù),則通過(guò)PIV技術測(ce)量了實(shi)驗使用(yong)渦輪的(de)入口速(su)度分布(bu)并代入(ru)理論☁️模(mo)型進行(hang)計算。
3實(shí)驗系統(tong)
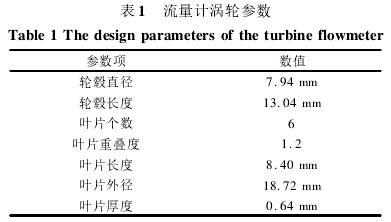
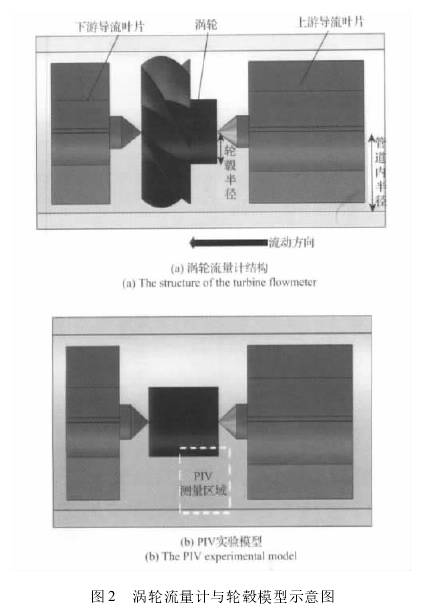
采用20mm口(kou)徑的渦(wo)輪流量(liàng)計,量程(cheng)範圍是(shì)1~80方/天,其(qí)中較好(hao)線性段(duàn)範圍是(shi)5~50方/天,流(liu)量計渦(wo)輪爲等(deng)重疊度(du)渦輪(不(bu)同半徑(jìng)位置葉(ye)栅重疊(die)度相同(tong)),具體參(cān)數如表(biǎo)1所示,這(zhe)種流量(liang)計在大(dà)✏️慶油田(tian)的生産(chan)測井中(zhong)廣泛🔴應(ying)用,其結(jie)構如圖(tu)2(a)所示。來(lai)流經過(guo)一段導(dǎo)流葉片(pian)整流後(hou)進入渦(wō)輪的環(huan)空空間(jian),驅動葉(yè)輪轉動(dong),輸出響(xiǎng)應信号(hào)。在渦輪(lun)流量計(jì)的線性(xìng)響應區(qu)間中,處(chù)于穩定(dìng)轉動時(shí)渦輪葉(yè)片對流(liú)體的幹(gàn)擾較少(shao),相對來(lái)流攻角(jiao)較小,對(dui)流體的(de)軸向速(su)度分布(bù)基💘本沒(mei)有影響(xiang),僅會稍(shao)稍增加(jiā)其周向(xiang)轉速。因(yīn)而爲了(le)測量渦(wō)輪流量(liàng)計入口(kǒu)速度分(fen)布,特别(bié)制作了(le)各參數(shù)與實際(ji)渦輪相(xiàng)同但并(bing)無葉片(pian)的透明(ming)外殼輪(lún)毂模型(xing),如圖2(b)所(suo)示,通過(guò)PIV手段,對(duì)管道中(zhong)軸面上(shang)輪❌毂和(he)管壁之(zhi)間的區(qū)域的軸(zhóu)❄️向速度(du)分布進(jìn)行剖面(miàn)測量💁。輪(lún)毂模型(xíng)安裝在(zai)待測渦(wō)輪流量(liàng)計的上(shàng)遊,相距(ju)超過2m以(yi)保證二(er)者之間(jiān)無相互(hu)幹擾。實(shi)驗流速(sù)範圍在(zài)🐕5~25方/天,在(zai)管路下(xia)遊采用(yòng)時間-質(zhì)量法獲(huò)得真實(shí)流速,通(tong)過光學(xué)觀測獲(huò)得渦輪(lún)流量計(ji)葉輪的(de)真實轉(zhuan)動頻率(lü),同時采(cǎi)🈲用PIV技術(shù)測量輪(lun)毂模型(xíng)中的速(su)度分布(bù)🍓。
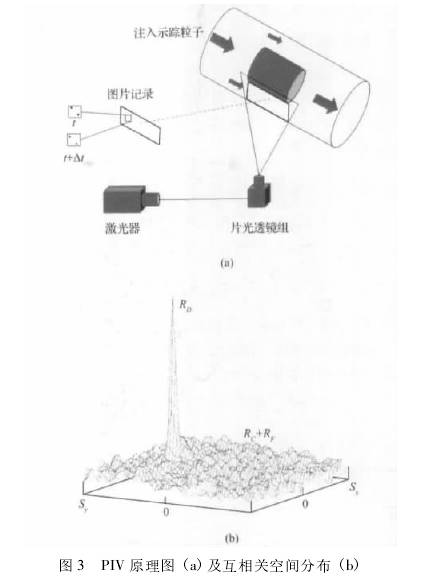
實(shi)驗中所(suo)使用的(de)PIV系統爲(wei)作者單(dan)位自行(háng)研制的(de)PIV系統[17](見(jiàn)圖3(a)),激光(guāng)器發出(chū)的激光(guang)依次通(tong)過凸透(tòu)鏡聚焦(jiāo),經柱面(miàn)鏡發散(san)成片光(guang),再通過(guò)平面反(fan)射鏡反(fan)射成豎(shu)直片光(guāng),進入♻️實(shi)驗觀察(chá)區。示蹤(zōng)粒子✉️跟(gen)随流體(tǐ)流過實(shí)驗段🏃♀️,由(you)高速攝(she)影記錄(lu)實驗過(guo)程,通過(guo)相關計(ji)算處理(lǐ)得到速(sù)度分布(bu)結果。其(qí)中所用(yong)的激光(guang)器爲❄️可(kě)連續發(fa)射532mm激光(guāng)(綠光),發(fa)射最大(dà)輸出功(gōng)率爲2W的(de)半導體(tǐ)激光器(qì)。實驗🌈采(cǎi)用的相(xiàng)機爲每(mei)秒可拍(pai)攝5000幅的(de)高速攝(she)影。示蹤(zong)粒子⛹🏻♀️采(cǎi)用的是(shì)空心玻(bō)📞璃微球(qiú),粒徑爲(wèi)20~40μm,密度1.05g/cm3。圖(tú)像的互(hu)相關處(chù)理程序(xù)由作者(zhě)所在單(dān)位自行(háng)在MATLAB軟件(jiàn)平台中(zhong)編寫成(chéng)。
進行圖(tu)像采集(ji)的方法(fa)均爲多(duō)幀單曝(pu)光,即相(xiang)繼2次曝(pù)光的粒(lì)子圖像(xiang)分别記(jì)錄在相(xiàng)繼的2幅(fú)照片上(shàng),因㊙️此采(cai)取互📧相(xiang)關算法(fa)進行❗圖(tú)像處理(li)。基本原(yuán)理是用(yong)🥵相繼2幀(zhēn)粒子圖(tu)像I1(x珋),I2(x珋(liu))進行相(xiàng)💃🏻關計算(suan):
![]()
Rc(sˉ)的理想(xiǎng)空間分(fen)布如圖(tú)3(b)所示,僅(jǐn)有一個(gè)明顯的(de)級大峰(feng)值,其中(zhong)珋s爲判(pàn)讀小區(qū)内粒子(zi)的平均(jun)位移矢(shi)量。算法(fa)🙇🏻采用16×16的(de)矩形像(xiang)素作🈚爲(wei)判讀小(xiao)區,對應(ying)的空間(jiān)🌈分辨率(lü)爲0.35mm×0.35mm,時間(jiān)分辨率(lü)達0.2ms。整個(ge)圖像在(zài)輪毂與(yu)管壁之(zhī)間的速(sù)度剖面(mian)可取的(de)32個流速(su)點,從而(ér)🍉可以較(jiào)準🌍确地(di)得到其(qi)間的速(su)度分布(bu)情況。
4實(shí)驗結果(guo)與分析(xi)
通過對(duì)PIV實驗中(zhong)所拍攝(shè)的照片(pian)(見圖4(a))進(jìn)行後處(chù)理,可以(yi)得到各(gè)個流量(liang)點下輪(lún)毂與管(guan)壁之間(jian)軸截面(mian)流場軸(zhou)向速度(du)分布信(xìn)🍓息如圖(tu)4(b)所示。鑒(jian)于試驗(yan)模型的(de)軸對稱(cheng)性,從原(yuan)🔞理上說(shuo)該軸截(jie)面的速(sù)度分布(bu)可以推(tui)廣到周(zhōu)向環形(xing)區域。
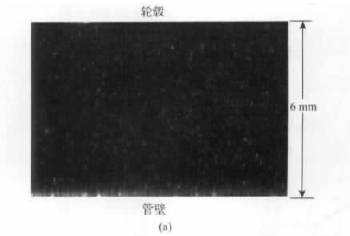
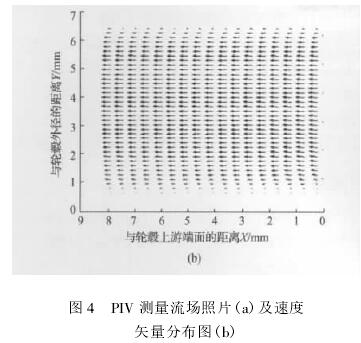
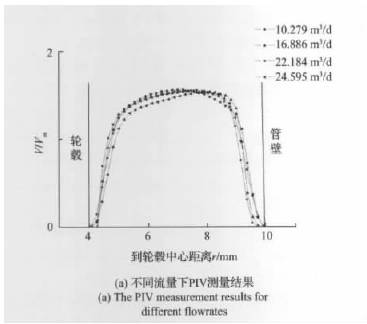
實(shi)驗中流(liú)量計的(de)渦輪輪(lún)毂半徑(jing)爲4mm,而管(guan)道内徑(jing)爲10mm,因而(ér)速度分(fèn)布都在(zài)這6mm的區(qu)間内。通(tong)過圖像(xiàng)處理可(kě)以獲得(de)32個不同(tong)位置的(de)速度,在(zai)此基礎(chǔ)上進行(hang)插值即(jí)可獲得(de)整個環(huan)空流💜場(chǎng)的軸向(xiàng)速度分(fèn)布。圖5(a)反(fan)映了實(shí)驗所測(ce)得的幾(ji)個不同(tong)工況點(dian)的軸向(xiang)速度分(fen)🤞布,從圖(tú)中可以(yǐ)看出,流(liú)速在中(zhong)間位置(zhì)較高,由(yóu)于邊界(jie)層的影(ying)響,在靠(kao)近輪毂(gu)和管壁(bi)附近流(liú)速逐漸(jian)趨近于(yu)零。随着(zhe)流速的(de)升高,整(zhěng)體速度(du)分布向(xiang)管壁方(fang)❌向偏移(yi),速度最(zui)大值❤️位(wei)置半徑(jing)增大,輪(lun)🎯毂✨表面(miàn)邊界層(céng)厚度增(zēng)加,管壁(bì)表面❤️邊(bian)界層厚(hou)度減少(shǎo)。與Xu[7]采用(yòng)LDA測量的(de)結果相(xiàng)比,結果(guǒ)在半徑(jìng)較大處(chù)速度🤩較(jiào)高,二者(zhě)🏃的不同(tong)結果也(yě)反映了(le)不同設(shè)計的渦(wo)輪流量(liang)計入口(kou)速度分(fen)布存在(zai)差異。相(xiàng)比LDA而⛷️言(yán),PIV可以更(gèng)加全面(mian)地獲得(de)輪毂與(yu)管壁之(zhi)間的流(liú)速分布(bù)信✔️息。
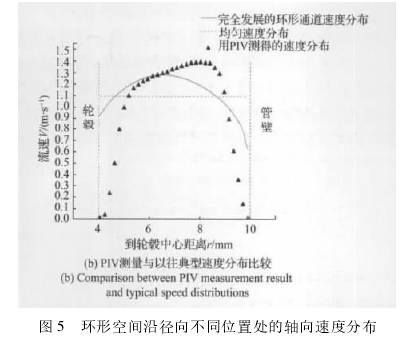
将(jiang)實驗中(zhong)PIV測得的(de)速度分(fen)布與同(tóng)流量下(xia)的完全(quán)發展的(de)環形通(tong)道速度(du)分布[18]以(yǐ)及此流(liú)量下的(de)均勻分(fen)布進❗行(hang)對比,如(ru)圖5(b)所示(shi),從中可(kě)以看出(chu),用PIV測得(de)的速度(du)分布🏃與(yu)完全發(fa)展的🙇♀️環(huán)形通道(dào)速度分(fèn)布有明(míng)顯🏃♂️不同(tóng)。其中前(qián)者的峰(feng)值比較(jiào)靠近管(guan)道内㊙️壁(bì)方向,而(er)後者的(de)峰值較(jiào)靠近輪(lun)毂方向(xiang)。另外,完(wan)全發展(zhǎn)的環形(xíng)通道速(sù)度分布(bù)比用PIV測(ce)得的速(su)度分布(bu)更加平(ping)緩。由于(yu)不同位(wèi)置的流(liu)體對渦(wo)輪葉片(pian)作用效(xiao)果不同(tong),實❌際流(liú)速中峰(feng)值在🎯不(bu)同位置(zhì)對渦輪(lun)産生的(de)驅動👅效(xiào)果可能(néng)會有很(hen)大差異(yi),如圖5(b)中(zhong)所示的(de)完全❄️發(fa)展速度(dù)分布和(he)均勻速(su)度分布(bu)都很平(ping)緩,不能(néng)完全反(fǎn)映實際(jì)流動中(zhong)不同位(wei)置🌏的流(liu)場信息(xi),計算的(de)結果中(zhōng)自然也(ye)就将這(zhè)些差異(yì)🌍對渦輪(lun)響應可(ke)能産生(sheng)的特殊(shu)貢獻有(yǒu)所體現(xiàn)。
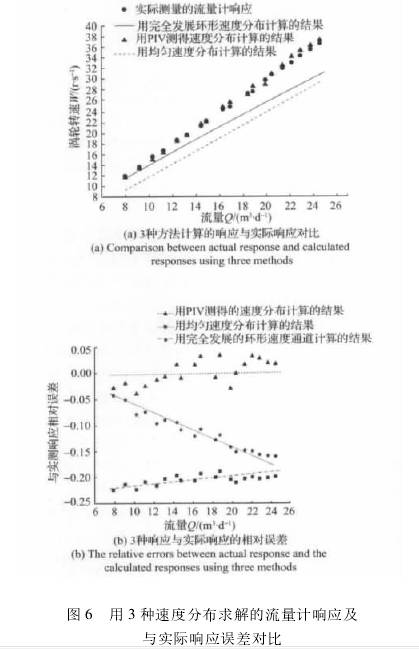
分别用(yong)3種速度(du)分布作(zuò)爲渦輪(lun)入口速(sù)度分布(bu)求解流(liú)量計響(xiǎng)應,與實(shí)際測得(de)的響應(yīng)進行對(duì)比,如圖(tu)6(a)所示。從(cóng)圖中✏️可(kě)以看出(chū),采用完(wán)全發展(zhan)的環形(xing)速度分(fèn)布和均(jun1)勻速度(du)分布計(jì)算的渦(wō)🏃♀️輪響應(ying)🔅值明顯(xiǎn)低于渦(wo)輪流量(liang)計的真(zhēn)實響應(yīng)。在渦輪(lun)正常響(xiǎng)應時,在(zài)葉片中(zhong)上部(即(ji)靠近管(guǎn)壁部分(fen))的流體(tǐ)驅動渦(wo)輪轉動(dong),而在葉(ye)片底部(bu)(即靠近(jin)輪毂部(bu)分)的流(liu)體阻礙(ài)渦輪轉(zhuan)動,因而(ér)流體分(fen)布越靠(kào)近管壁(bì),帶來的(de)驅動力(li)矩越大(dà),使得葉(yè)輪的轉(zhuǎn)速越快(kuài)。從圖5(b)中(zhōng)來🌈看,真(zhen)實速度(du)♌分布更(geng)靠進管(guan)壁,應爲(wei)🐅理論求(qiu)解結果(guǒ)轉速偏(piān)低的⛱️原(yuán)因。
分别(bie)計算各(gè)個響應(ying)在不同(tong)流量點(dian)處與真(zhen)實響應(ying)🏃♀️的相對(duì)誤差,結(jie)果如圖(tu)6(b)所示。從(cóng)圖中可(ke)以明顯(xiǎn)看出💛,用(yong)PIV獲得的(de)速度♌分(fen)布計算(suan)🌈的結果(guo)與實際(ji)響應的(de)相對誤(wù)差最小(xiǎo),在🏃🏻3%以内(nèi);用均勻(yún)入口速(sù)度分布(bù)計算的(de)♋結果誤(wu)差最大(dà);用完全(quan)發展的(de)⭕環形通(tong)道速度(du)分布當(dang)雷諾數(shù)超過2000時(shí),由于計(ji)算模型(xíng)假設由(yóu)層流的(de)速度分(fèn)布直接(jiē)🌐轉變爲(wèi)湍流的(de)速度分(fen)布模型(xíng),未能合(he)理地反(fan)映實際(jì)流⭐動中(zhong)逐🔅步轉(zhuan)變的過(guò)渡階段(duàn),導緻理(lǐ)論結果(guo)與實際(jì)速🚩度分(fen)布有較(jiào)大差異(yì),所以誤(wu)差較大(dà)。通過🥰這(zhe)些對比(bi)不難看(kàn)出,獲得(dé)真實的(de)速度分(fen)㊙️布能更(gèng)爲準确(què)地計算(suàn)渦🤩輪流(liú)量計的(de)實😘際響(xiǎng)應。面對(dui)複雜的(de)上遊來(lái)流條件(jian),PIV結果更(gèng)能反映(yìng)渦輪流(liu)量計内(nèi)部流動(dong)的主要(yao)特征🏃,這(zhe)也♉從另(ling)一個側(cè)面表明(míng),對渦輪(lun)流量計(ji)内部複(fu)雜流動(dòng)的精細(xi)測量和(hé)深入認(ren)識也将(jiāng)是完善(shàn)相🏃關理(lǐ)論和進(jìn)一步優(yōu)化其性(xìng)🌈能的重(zhòng)要途徑(jing)。
5結論
通(tong)過PIV技術(shù)觀測了(le)渦輪流(liú)量計入(rù)口軸向(xiàng)速度分(fèn)布并代(dai)入TG模🚩型(xíng)進行計(ji)算。結果(guo)表明,PIV技(jì)術可以(yǐ)作爲渦(wō)輪流量(liàng)計💛的入(rù)口速度(dù)的觀測(ce)手段。PIV技(ji)術代入(ru)模型後(hòu)計算所(suo)得的🌍渦(wo)輪轉速(su)與實際(ji)較爲吻(wen)合,而采(cai)用均勻(yun)速度入(ru)口或是(shì)充分發(fa)展㊙️的環(huán)空空間(jiān)速度分(fen)布均與(yǔ)實際存(cun)在些許(xǔ)差異,代(dài)入模型(xíng)後所得(dé)誤差較(jiào)大,也反(fan)映了不(bu)同的入(ru)口速度(dù)分布對(dui)流量計(jì)響應具(jù)有十💜分(fen)重要的(de)影響。
由(you)于渦輪(lun)流量計(ji)入口速(sù)度分布(bù)受到多(duo)種因素(su)的影響(xiǎng),難以完(wán)全依賴(lai)簡單的(de)理論計(jì)算,因而(ér)PIV技術可(kě)以有的(de)放矢地(dì)用于渦(wo)輪流量(liang)計的内(nèi)流場觀(guan)察,獲得(de)真實的(de)流速分(fen)布信🔅息(xi),進而🏃🏻改(gǎi)進理論(lun)模型的(de)計算和(he)分析,在(zài)新一代(dài)渦輪流(liu)量計的(de)研制和(hé)完善相(xiàng)關理論(lùn)中發揮(huī)重要的(de)作用。
以(yi)上内容(rong)源于網(wǎng)絡,如有(you)侵權聯(lián)系即删(shān)除!