摘要(yao):通過對(duì)渦街流(liú)量計
的(de)儀表常(chang)數随着(zhe)流速的(de)變化而(er)略有起(qǐ)伏這個(gè)規律的(de)觀察與(yǔ)總結,建(jiàn)立數學(xue)模型,并(bìng)根據這(zhè)個數學(xue)模型,可(kě)以在不(bú)同的流(liu)速段對(dui)儀表常(cháng)數做适(shì)當的補(bǔ)償,可以(yi)提高渦(wo)街流量(liang)計的計(jì)算精度(dù)。該方案(àn)通過單(dān)片機809C51實(shi)現。
1引言(yan)
根據多(duo)年的應(yīng)用經驗(yàn)以及大(dà)量的現(xian)場數據(jù),我們發(fa)現渦街(jie)流量計(ji)的儀表(biǎo)常數與(yǔ)流體的(de)流速存(cún)在💋一定(ding)🏃♂️的關系(xì),本文通(tōng)過尋找(zhǎo)渦街流(liu)量計儀(yí)表常數(shù)與流體(ti)流速的(de)關系,建(jiàn)立了兩(liǎng)者的數(shù)學模型(xíng),在流量(liàng)計算時(shi)⭐對它進(jìn)行補償(chang),提高了(le)計算精(jīng)度。
1.1渦街(jiē)流量計(jì)的工作(zuò)原理
渦(wō)街流量(liàng)計是基(jī)于卡門(men)渦街原(yuán)理制成(chéng)的一-種(zhǒng)流.體振(zhèn)🚶♀️蕩性流(liu)量計,即(jí)在流動(dòng)的流體(ti)中放置(zhi)一個非(fēi)流線型(xing)的對稱(chēng)💁形狀的(de)物✍️體(渦(wo)街流量(liang)傳感器(qì)中稱之(zhi)爲漩渦(wō)發生體(ti)),就會🏃♀️在(zai)其下流(liú)兩側産(chan)生兩列(liè)有規律(lǜ)的漩渦(wō),即卡門(men)渦街其(qí)漩渦頻(pin)率正😘比(bi)于流體(tǐ)速度:

式(shi)中:F一旋(xuán)渦頻率(lü);d一漩渦(wo)發生體(tǐ)寬度;u一(yi)流體速(su)度;St一斯(si)特勞哈(ha)爾數。
St的(de)值與漩(xuán)渦發生(shēng)體寬度(du)d和雷諾(nuo)數Re有關(guān)。當Re<2x104時,S,爲(wèi)變數🏒:當(dang)Re在2x104~7x106的範(fàn)圍内,St值(zhí)基本上(shang)保持不(bú)變。
上式(shi)表明,當(dāng)d和St爲定(ding)值時,漩(xuan)渦産生(sheng)的頻率(lǜ)F與流體(ti)的平均(jun)流速u成(cheng)正比,利(li)用這-特(tè)性制成(chéng)了渦街(jiē)流量計(jì)。
1.2渦街流(liú)量計的(de)特點
(1)輸(shū)出的信(xin)号是與(yǔ)流速成(chéng)正比的(de)脈沖信(xìn)号,便于(yú)數據處(chu)理和❤️計(jì)算機聯(lián)網。
(2)量程(cheng)範圍寬(kuan),精度高(gao)。
(3)無可動(dong)部件,可(kě)靠性較(jiao)高,結構(gou)簡單,便(bian)于安裝(zhuāng)維修。
(4)檢(jiǎn)測元件(jiàn)與被測(ce)介質不(bu)直接接(jiē)觸,不受(shòu)流體的(de)化學性(xìng)質影🔴響(xiǎng),應用範(fàn)圍寬,壽(shòu)命長。
(5)抗(kàng)幹擾能(néng)力強,容(róng)易進行(háng)流量計(ji)算,不受(shou)流,體物(wu)理性質(zhì)💋的影響(xiǎng)🈲,給儀表(biǎo)的标定(ding)和使用(yong)帶來了(le)方便。
2誤(wù)差的産(chǎn)生及補(bǔ)償
2.1非線(xiàn)性誤差(cha)的産生(sheng)
由于渦(wō)街傳感(gǎn)器所測(cè)的并不(bú)是平均(jun1)流速,而(ér)是漩渦(wo)發🔱生體(ti)兩側的(de)流速。對(dui)于湍流(liu)狀态,不(bu)同的雷(lei)諾數下(xià),流速分(fen)布規律(lǜ)是不同(tóng)的,即不(bu)同的流(liú)速下具(jù)有不同(tong)的流速(su)分布,進(jìn)而說明(ming)了渦街(jiē)流量傳(chuan)感器✊檢(jiǎn)測到的(de)主要反(fǎn)映漩渦(wō)發生體(ti)兩側的(de)💋流速,與(yǔ)管道平(píng)均流速(su)的關系(xì)不是唯(wéi)一确定(ding)的。這說(shuo)明渦街(jiē)流量傳(chuan)感器👉的(de)非線性(xìng)誤差是(shì)❄️其檢測(ce)機理所(suǒ)決定的(de)。在實際(ji)使用時(shi)💃,先繪出(chū)傳感器(qi)的儀表(biǎo)常數與(yu)流體流(liu)速的試(shì)驗曲線(xiàn)🐪,據此得(de)到不同(tóng)流速段(duàn)的實際(ji)儀表常(cháng)數🌈。本文(wen)應用MCS-51單(dān)片機系(xi)列的89C51将(jiāng)試驗曲(qǔ)線事⭐先(xiān)固化于(yú)流量計(ji)的EPROM中,用(yòng)戶結合(he)現場具(ju)體工作(zuo)情🔱況通(tōng)過鍵盤(pán)輸人平(ping)均儀表(biǎo)常數Kp的(de)值(Kp=(Kmax+Kmin)/2),實現(xiàn)了渦街(jiē)傳感器(qì)的非線(xiàn)性修正(zhèng)。
2.2儀表常(cháng)數與流(liú)體流速(su)的關系(xi)及分段(duàn)補償
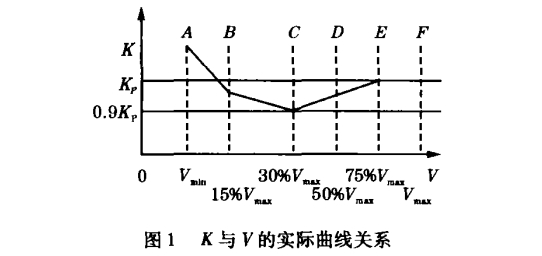
我(wǒ)們知道(dào)渦街流(liú)量計頻(pín)率與流(liú)量成正(zheng)比,理論(lun)上講🈲,渦(wō)街流量(liang)計輸出(chū)頻率與(yu)流速成(cheng)正比,也(yě)就是說(shuo)儀表常(cháng)數恒定(dìng)。實際上(shang),由于流(liú)量計本(ben)身的因(yin)素導緻(zhì)兩者之(zhī)間存在(zai)一定程(chéng)度的非(fei)線性誤(wù)差。鑒此(ci),我們做(zuo)出了一(yi)條儀表(biǎo)常數與(yu)流速的(de)實驗💘關(guan)系曲線(xian),如圖1所(suo)示。圖中(zhōng)各點坐(zuò)标分别(bié)爲A(Vmin,1.0049Kp),B(15%Vmax,0.997Kp),C(30%Vmax0.992853Kp),D(50%Vmax,0.94883Kp),E(75%Vmax,Kp),F(Vmax,Kp)。
針對(duì)這種誤(wu)差規律(lǜ),我們采(cai)取分段(duan)補償的(de)方式進(jin)行誤差(chà)🤩修正😍。由(yóu)圖1可以(yi)看出,随(suí)着流速(sù)的降低(dī),曲線偏(pian)離平均(jun)值越大(da),對此我(wo)們采用(yong)的方法(fǎ)可以達(da)到兩個(gè)目的:
(1)無(wú)論偏差(chà)值多大(da),隻要它(tā)有規律(lǜ)可循,就(jiu)可補償(chang)修正,還(hái)可✔️以把(bǎ)流量的(de)下限即(ji)Vmin在坐标(biao)上向左(zuǒ)移動,即(jí)✨擴大傳(chuán)感器的(de)量程⁉️。.
(2)根(gen)據精度(dù)要求合(he)理劃分(fen)區間,在(zài)誤差大(dà)的低流(liú)速🏃🏻區✔️間(jiān)線段取(qu)密一些(xiē),在誤差(chà)小的高(gāo)流速區(qū)間可适(shì)當将區(qū)間放寬(kuān)。
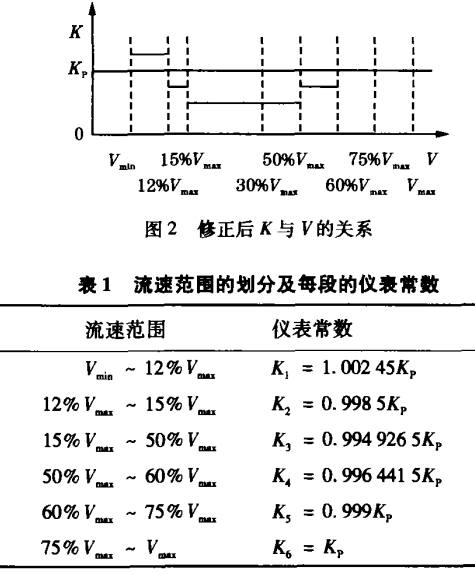
爲了滿(man)足修正(zhèng)後非線(xian)性誤差(chà)在0.3%以下(xià)的要求(qiu),我們☔根(gēn)據理論(lun)♍分析和(he)曲線規(guī)律,分别(bié)在12%Vmax、60%Vmax處增(zēng)加兩點(diǎn)(見圖2),坐(zuò)标分别(bié)爲G(12%Vmax,Kp),H(60%Vmax,0.998Kp)。理由(yóu):①Vmin/Vmax=8%~9%;②DE曲線間(jiān)無拐點(diǎn)且下凹(ao);③AB曲線間(jiān)✂️無拐點(dian)且下凹(ao)。這樣,把(ba)整個流(liú)速範圍(wéi)💜分成了(le)六段☔,如(ru)表1。這樣(yàng)處理後(hòu),可修正(zheng)非線性(xìng)誤差在(zài)0.3%以下。
2.3補(bǔ)償後非(fēi)線性誤(wu)差計算(suan)及驗證(zheng)
表2爲補(bu)償後各(ge)段儀表(biǎo)常數的(de)非線性(xìng)誤差計(jì)算值。
下(xia)面用某(mǒu)廠生産(chan)口徑爲(wèi)Dg80的渦街(jie)流量計(ji)爲例驗(yàn)證補償(chang)效果(産(chan)品編号(hao):04150)。
表3爲原(yuán)始檢測(ce)數據。
平(ping)均儀表(biao)常數:
Kp=(Kmax+Kmin)/2=2132.4305
非(fei)線性誤(wu)差:
δ=(Kmax-Kmin)/(Kmax+Kmin)x100%=0.62%
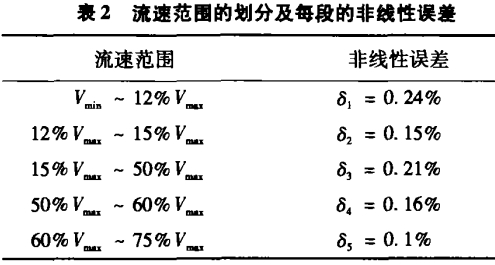
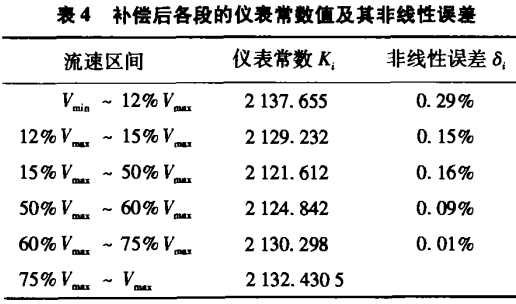
表4爲(wei)補償後(hou)的各段(duàn)儀表常(chang)數以及(ji)非線性(xing)誤差計(ji)💘算值。由(you)此可🏃🏻見(jiàn),補償後(hou)精度得(de)到了提(tí)高。

2.4計算(suàn)流量
瞬(shùn)時流量(liàng)計算公(gōng)式:

Q=qvt
式中(zhōng):fi、Ki-----第i頻率(lǜ)段的漩(xuán)渦分離(li)頻率和(hé)相應的(de)儀表常(cháng)數㊙️;t---累計(jì)❄️時間。
3系(xì)統的實(shi)現
3.1系統(tong)可以實(shi)現的功(gong)能
(1)以89C51爲(wei)核心元(yuán)件,X25045存儲(chu)數據。
(2)采(cai)用82C79單片(piàn)機,可以(yǐ)同時顯(xian)示瞬時(shi)流量(4位(wei))以及累(lèi)積💔流量(liang)(6位+2位幂(mì)數),其顯(xian)示單位(wei)爲體積(jī)流量。
(3)具(jù)有掉電(diàn)檢測、保(bǎo)護功能(néng)(HT7044監測電(dian)壓),掉電(dian)後數據(jù)存人X25045中(zhōng)。
(4)具有看(kan)門狗功(gōng)能。
(5)采用(yòng)鍵盤輸(shū)人,輸入(ru)内容包(bao)括:儀表(biǎo)常數、瞬(shùn)時流量(liang)上限、瞬(shùn)時流量(liang)下限等(deng)。
3.2主要程(cheng)序模塊(kuai)
(1)主程序(xu)。
(2)定時器(qì)中斷服(fu)務程序(xu)。
(3)鍵盤中(zhong)斷處理(lǐ)子程序(xù)。
(4)掉電處(chù)理子程(chéng)序。
(5)25045讀/寫(xie)狀态寄(ji)存器子(zi)程序。
(6)瞬(shun)時流量(liàng)計算程(chéng)序SSJS。
(7)累積(ji)流量計(ji)算程序(xu)LJJS。
(8)量程判(pàn)别子程(cheng)序CSDS。
4結束(shu)語
用單(dan)片機89C51驗(yàn)證了誤(wù)差補償(cháng)的數學(xué)模型,并(bing)實現了(le)高精度(du)智能㊙️渦(wo)街流量(liang)積算儀(yi)的設計(ji),通過對(dui)儀表常(cháng)數的修(xiu)正使🌐系(xì)統的精(jīng)度有很(hen)大的提(ti)高,可以(yi)使渦街(jie)流量積(jī)算儀達(dá)到💚0.5級标(biao)準。采用(yong)89C51單片機(ji)使系統(tǒng)的穩定(ding)性和快(kuai)速性都(dōu)得到了(le)提高,82C79專(zhuān)用🌈的鍵(jian)盤顯示(shi)接口芯(xīn)片,代替(ti)單片機(jī)完成鍵(jian)盤和⛹🏻♀️顯(xiǎn)示器的(de)許🐇多接(jie)口操作(zuo),X25045可以将(jiāng)數據實(shi)時存儲(chu)起來。系(xi)統軟硬(yìng)🍓件設計(jì)合🌐理、可(kě)行,具有(yǒu)工程實(shí)用價值(zhí)。
本文來(lái)源于網(wang)絡,如有(yǒu)侵權聯(lian)系即删(shān)除!