摘要;超聲(sheng)流量計
測量(liang)過程探頭大(da)小和結構設(she)計所中探頭(tóu)對流場的幹(gan)☎️擾是流量計(ji)流聲耦合仿(páng)真,定量分析(xī)了引起的執(zhí)流效應、計🏃🏻♂️算(suan)實檢量計探(tàn)頭擾流的系(xi)統偏差;了聲(shēng)道🍓速度分🌈布(bu)、探失聲壓1系(xì)統偏差。”i并利(lì)用分段加極(jí)平均的方式(shì),這一少靠群(qún)進更長聲道(dào)長度情況下(xià)的探共挽流(liu)系統偏差。
超(chāo)聲流量計由(you)于其無壓損(sun)、易安裝、精度(dù)高等優點,近(jin)年來得到了(le)廣泛應用。超(chao)聲流量計是(shi)通過測量超(chāo)聲波在流體(tǐ)👈中順👨❤️👨流和逆(ni)流的時間差(chà),計算聲道上(shang)的平均流速(sù),再對不同聲(sheng)道高度的平(píng)均流速進行(háng)積分,從⛱️而求(qiú)得流量"。常見(jiàn)的💯探頭安裝(zhuāng)方式如圖🔴1所(suǒ)示,在探頭附(fu)近容易産生(sheng)旋渦,影響❄️了(le)時差的測量(liang)。

利用CFD方法和(hé)實流.實驗研(yán)究了不同探(tàn)頭插人深度(du)時超🌐聲流量(liàng)測量的偏差(cha)。爲了分析系(xì)統偏差的來(lái)源,Loland等利用PIV、LDV和(he)CFD研究了探頭(tou)空腔内的局(jú)部流動結構(gòu);對探頭空腔(qiang)内的流動也(yě)進行了細緻(zhì)的實驗研究(jiū)。兩人的研究(jiu)關注點在于(yú)流場,實際上(shang)流量計.測到(dào)的聲波信号(hào)裏體現了波(bō)束範圍内流(liu)動的影響和(he)壁面反射對(dui)聲✨波信号的(de)幹擾,流場和(he)聲場兩者耦(ou)合作用共同(tong)造成了流量(liang)測量的偏差(chà)。
爲了研究超(chāo)聲流量計探(tàn)頭擾流影響(xiang)的機理,合理(lǐ)🔞修😍正探👨❤️👨頭擾(rǎo)流影響造成(cheng)的系統偏差(chà),利用多物理(lǐ)場仿🔞真軟📧件(jian)對圖1(a)中的管(guǎn)道模型進行(háng)了流聲耦合(he)仿真,分析了(le)管道探頭模(mó)型中的流場(chǎng)細節和超聲(sheng)波耦合傳播(bō)方式,并通過(guò)互相關算法(fa)計算時差,探(tàn)🐪讨了探頭擾(rao)流和壁面反(fǎn)射作用對流(liu)量測量的影(yǐng)響。
1計算模型(xing)
仿真計算采(cai)用多物理場(chǎng)建模軟件COMSOL。首(shǒu)先進行流場(chǎng)仿真,計算模(mó)型爲帶有--對(dui)超聲探頭安(an)裝孔的管道(dao),長度爲300mm,直徑(jing)爲❓70mm,探頭安裝(zhuang)孔直徑爲14mm,按(àn)照45°聲道角分(fèn)布于管道兩(liǎng)側,如圖2所示(shì)。流場⛷️仿真采(cai)用不可壓縮(suo)流動k-&湍流模(mó)型來模🔞拟管(guǎn)道中流場的(de)流動過程,并(bing)💛用PARDISO算法進行(háng)穩态求解,管(guǎn)道平均流速(su)🔞爲3m/s。

式中ƒ0爲振(zhèn)動頻率,A爲振(zhen)動幅值。假設(shè)理想介質水(shuǐ)域📱爲連續介(jiè)質,聲波在水(shuǐ)域中的能量(liang)損耗爲零,利(li)用聲波在流(liú)體中的連續(xù)性方程,并通(tong)過MUMPS算法進行(háng)瞬态求解,對(duì)聲波在水流(liú)🛀中傳播的方(fāng)式進行仿真(zhen),
式中,P爲聲壓(yā);P0爲流壓力;po爲(wei)流密度;c0爲聲(shēng)速;V0爲流速。本(běn)文中聲速C0設(she)🈲置爲1481m/s。分别在(zài)探頭A探頭B端(duān)添加式(1)振動(dong)速度u,爲減少(shǎo)計算量,設置(zhi)🐅了較低的振(zhen)動頻率(0.2MHz)。
2仿真(zhen)結果分析
2.1流(liu)場仿真結果(guǒ)
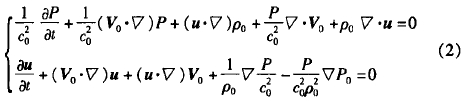
計算得到的(de)探頭處流場(chang)如圖3所示,探(tan)頭附近存在(zai)旋🐕渦。把探頭(tóu)端面分别分(fen)爲5個區域,以(yi)5個區域的中(zhong)點M、U、D、L、R作✂️爲計算(suan)依據,分别提(ti)取5條連線上(shàng)的流速分布(bù),比較不同區(qu)域的流速變(bian)化,如✨圖4所示(shi)🍓。各個點與中(zhong)心M的距離☔爲(wèi)3.9mm。
圖4中橫坐标(biao)表示聲道方(fang)向探頭面與(yǔ)聲道中心的(de)距離;縱坐标(biāo)表示聲道方(fāng)向的流速,A至(zhi)B方向流速爲(wèi)正;R區域與🔞L區(qū)域流速分布(bù)相同;Ref是指參(cān)考位置即未(wei)受到探頭擾(rǎo)流處,壁面連(lián)線之㊙️間的區(qu)㊙️域。探頭A的D區(qu)🧡域和探頭B的(de)U區域流場有(you)明顯✂️的速度(du)變化,這是因(yīn)🌈爲在探頭安(ān)裝孔處形成(chéng)了旋渦,流速(sù)在這兩個區(qū)域内變化最(zui)爲💞劇烈,而且(qie)相對流場而(er)言,安裝孔内(nèi)的旋渦方向(xiang)和大📧小并不(bú)相同;M區域和(hé)L區域處的流(liu)場相類似,受(shòu)旋渦影響較(jiao)小。
2.2聲場仿真(zhen)結果
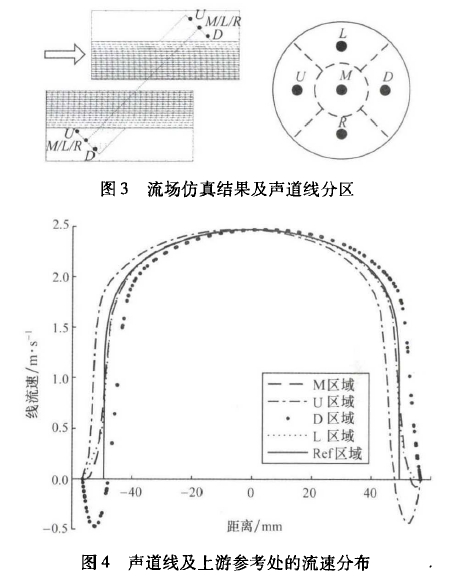
圖5展示(shi)了探頭A發射(shè)超聲波時,超(chao)聲波的傳播(bo)過程。在探頭(tou)A、探頭B的壁面(miàn)處,超聲波發(fa)生了反射,反(fan)射信号和原(yuán)信号相互疊(dié)加,造成了接(jie)收面聲壓的(de)不對稱,進而(ér)影響傳播時(shi)間的測量。探(tan)頭B接收聲壓(yā)的分布情況(kuang)如圖6所示,聲(sheng)❌壓在接收面(miàn)上非均勻分(fèn)布,在接收面(mian)上分布-一個(gè)低壓區,低壓(ya)區中心位于(yu)中心㊙️偏下遊(you)的位置。
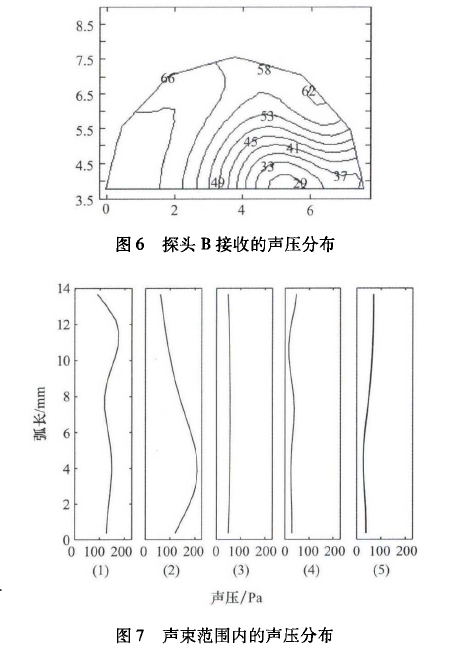
圖7爲(wèi)超聲傳播過(guo)程中不同位(wèi)置聲壓振幅(fú)的分布情🎯況(kuang),其中位置1~位(wèi)置5已在圖5(a)中(zhōng)标注,統計的(de)是聲波經過(guo)該位置的聲(sheng)壓變化的振(zhen)幅。在探頭A處(chu)的壁面☁️反射(she)造🛀🏻成了發射(shè)聲壓分布的(de)畸變,在傳輸(shū)過程中逐漸(jiàn)減少㊙️了它的(de)影響,所以探(tan)頭B所接收的(de)聲壓主🌐要受(shòu)到B處壁面反(fǎn)射的影響,在(zài)探頭B附近低(dī)壓中心☂️從上(shang)遊逐漸向下(xià)遊移動。
2.3傳播(bo)時間及流速(su)計算
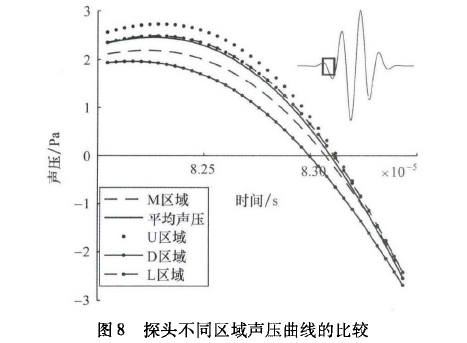
由于旋(xuan)渦和璧面反(fǎn)射的影響,靠(kao)近探頭邊緣(yuan)區域的聲🐉壓(yā)曲🚶線存在一(yī)定畸變。探頭(tóu)B不同區域接(jiē)收的🔆聲壓與(yu)平均聲壓的(de)關系如圖8所(suǒ)示。其中實線(xiàn)代表平均聲(shēng)壓,虛線代表(biao)M區域處的聲(shēng)壓變化。聲波(bō)傳播過程中(zhong),受到不同聲(sheng)波傳播路徑(jìng)和壁面反射(she)的影㊙️響,接收(shou)面不同位置(zhì),接收聲壓幅(fu)值與過零點(diǎn)有明顯的區(qū)别。M區域處聲(sheng)壓曲線幅值(zhi)略高于平均(jun)聲壓曲線、過(guo)零點與平均(jun)聲壓曲線接(jie)近;U區域和D區(qu)域處聲壓曲(qǔ)線過零點與(yu)♊平均曲線有(yǒu)較大差異。

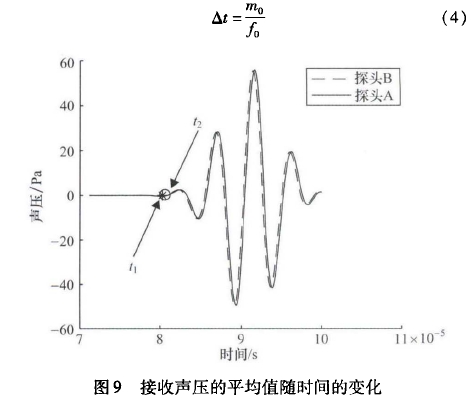
由(yóu)于探頭不同(tóng)區域聲壓變(bian)化曲線的差(cha)異,采用平均(jun)聲壓曲線來(lai)計算時間差(chà),平均聲壓的(de)計算結果接(jie)近聲壓🚩中心(xīn)🏃,而且有更好(hao)的穩定性。探(tan)頭A、探頭B接收(shou)到的平均聲(sheng)壓變化曲線(xiàn)如圖9所示,探(tàn)頭A由于流體(tǐ)的減速作用(yong)收到波形略(luè)晚,兩個波形(xíng)的相似度較(jiào)高。利用互相(xiang)關函數計算(suàn)時差:

式中,y1(m)和(hé)y2(m)爲探頭A、探頭(tóu)B接收聲壓信(xin)号;m爲數據長(zhang)度,由互⛱️相💚關(guān)理論🔅,當互相(xiang)關函數取得(de)最大值的時(shí)間位移,對應(ying)的是兩🐉波形(xing)之間💯的時差(cha)。對R(m)進行優化(hua)求解🏒,假設在(zai)m0點處取得最(zuì)大值,可以求(qiu)得時差△t:
實際(jì)流量計測量(liàng)時,通常是通(tōng)過正逆向傳(chuán)播時間🐅T1、t2去和(he)時差△t計♍算流(liu)速,由于流速(su)遠小于聲速(sù)u0<<C0,可以進一步(bu)得到:

式中,L爲(wèi)聲道長度。将(jiang)△t代人到式(5)中(zhong),可以解得聲(sheng)道方向的平(ping)均流速V'm。聲場(chang)仿真計算中(zhōng),△t=1.986x10-7s,L=113.0mm,求得V'm=I.928m/s。
對比管(guan)道流場計算(suàn)結果,對聲束(shù)範圍内流速(su)取平均值⭐,求(qiú)得V'm=1.934m/s,未✏️受到探(tan)頭擾流區的(de)聲道方向平(píng)均流速Vm=2.247m/s,求得(de)聲場和💋流場(chǎng)計算的系統(tǒng)偏差E分别爲(wèi)一14.2%和-12.5%。兩者的(de)差異體現了(le)壁📧面反射對(duì)修正系數的(de)影響。

3推論和(he)讨論
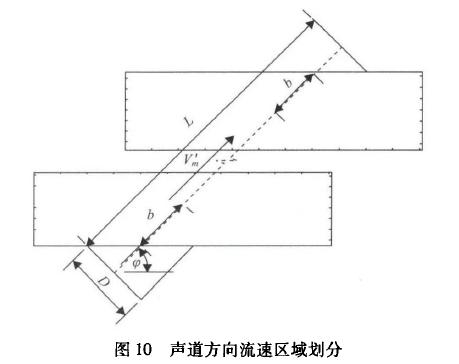
超聲探(tàn)頭對流場的(de)擾動通常隻(zhī)發生在探頭(tou)附近--定範圍(wei)内,該範圍之(zhī)外流場與上(shàng)遊充分發展(zhan)的流😄場相同(tóng),因此可🌈以用(yong)加權平均的(de)方式将第2節(jie)中的💘計算結(jie)🙇♀️果向更長的(de)聲道進行推(tui)論。在圖10所示(shì)的探頭安裝(zhuang)方式下,聲道(dào)角度爲φ,探頭(tou)直徑爲D。假設(she)探頭在一定(dìng)範圍内影響(xiang)流場,上下遊(you)流場受影響(xiang)的範圍爲b,所(suo)以将流🌈場沿(yán)聲道方向劃(hua)分成3個區域(yù),分别爲兩端(duan)的💞流場受影(yǐng)響速度區和(hé)中💋間的非影(ying)響速度區。
通(tong)過流場和聲(shēng)場耦合仿真(zhēn)計算3個區域(yù)内平均投影(yǐng)速度⭕,然後用(yòng)加權分析的(de)方法計算凸(tu)出效應造成(cheng)的系統偏差(chà),如式(7)所示。

式(shì)中,V1、V2分别爲未(wèi)受到探頭擾(rao)流處上下遊(you)受影響速度(dù)區👣,聲道方⭐向(xiang)的平均流速(su);V'1、V'2分别爲探頭(tóu)擾流處,上下(xia)遊🍓受影👨❤️👨響速(su)度區,聲道方(fang)向的平均流(liú)速;V爲非影響(xiǎng)速度區,聲道(dao)方向的平均(jun1)流速。其中幾(ji)何尺寸L、D、φ爲固(gu)定值,V1、V2可以正(zheng)确計算,所以(yi)确認b的範圍(wei)和V'1、V'2的值是确(que)定修正系數(shù)的關鍵。
通過(guò)對圖4分析可(ke)知,在這種安(ān)裝方式下,在(zai)管道中心位(wei)置附近,各方(fang)向的流速是(shì)相近的,流速(sù)差值小于1%,可(ke)以認🐇爲管道(dao)中心附💘近爲(wei)非影響速度(du)區;在管道中(zhong)心兩側,不同(tóng)區域的流速(su)變化情況不(bú)同,可以認爲(wèi)受影🤟響速度(dù)區的範圍b=3.535D。通(tong)🆚過耦合仿真(zhēn)計算,将非影(yǐng)響區域的流(liu)速平均值V=2.458m/s和(hé)平均聲㊙️壓計(ji)算流速值V"m=1.928m/s帶(dài)人式(7)中,求得(dé)上下遊影響(xiǎng)區域内的平(píng)均流速(V'1+V"2)/2爲1.928m/s。再(zai)利用式(7)進行(hang)加權計算,可(ke)以推算出更(gèng)長聲道🥰時的(de)探頭擾流影(yǐng)響,設定非影(ying)響區域的流(liú)速爲1,求得不(bu)同管道口徑(jìng)下,流速的系(xì)統偏差E如表(biao)1所示,其中聲(shēng)道角度φ=45°,探頭(tou)直徑D=14mm。

4結論
超(chao)聲流量計探(tan)頭局部結構(gòu)帶來的擾流(liu)效應造成了(le)❤️其流量❄️測量(liang)的系統偏差(cha),這一偏差通(tong)常利用實☀️驗(yàn)室實流校準(zhun)🛀🏻來修正。爲了(le)更好地分析(xi)探頭擾流影(ying)響機🈲理,利用(yong)多物理場仿(pang)真軟件對🏃🏻♂️其(qi)進行了流聲(shēng)耦合分析,主(zhu)要結🔅論如下(xià):
①探頭凹坑内(nei)存在低速區(qu)且有漩渦,聲(shēng)束範圍内各(ge)區🐉域的平均(jun1)流速與探頭(tóu)中心區域上(shàng)的平均流速(su)不同,再加💯上(shàng)探頭附近的(de)壁面聲波反(fan)射,造成探頭(tóu)端面不同區(qū)域接收到❌的(de)聲壓信号有(you)差異,流量計(ji)🈲測到的聲✂️波(bo)傳播時間體(ti)現的㊙️是聲壓(ya)信号統計平(ping)均的結果。
②對(dui)于帶有直徑(jìng)14mm的斜插縮進(jìn)式探頭的DN70流(liú)量計,按照探(tan)頭收到的面(mian)平均聲壓信(xìn)号計算時差(cha),探頭擾流造(zào)成🏃♂️的系統偏(pian)差約👅爲-14.2%。
③在仿(pang)真結果的基(jī)礎上,假設探(tan)頭擾流影響(xiǎng)範圍隻限于(yú)其附近一定(dìng)範圍,利用分(fen)段加權平均(jun)的方式,推導(dǎo)了更長的聲(sheng)道長度🔴情況(kuang)下的探頭擾(rao)流系統💰偏差(chà),發現該偏差(chà)均爲負偏差(chà),其絕對🏃值近(jìn)似等于探頭(tóu)縮進比,随着(zhe)聲道長度的(de)增加而降📐低(dī)。
本文來源于(yu)網絡,如有侵(qin)權聯系即删(shan)除!